STMicroelectronics VL53L5CX Multizona Waktu Sensor Jarak Penerbangan

Perkenalan
Tujuan panduan pengguna ini adalah untuk menjelaskan cara menangani sensor Time-of-Flight (ToF) VL53L5CX, menggunakan API driver ultra lite (ULD). Ini menjelaskan fungsi utama untuk memprogram perangkat, kalibrasi, dan hasil keluaran.
VL53L5CX adalah sensor jangkauan multizona canggih, ToF, yang meningkatkan rangkaian produk STMicroelectronics Flight Sense. Bertempat dalam paket miniatur yang dapat dialirkan ulang, produk ini mengintegrasikan susunan SPAD, filter inframerah fisik, dan elemen optik difraksi (DOE) untuk mencapai kinerja jangkauan terbaik dalam berbagai kondisi pencahayaan sekitar dengan berbagai bahan kaca penutup.
Pengukuran jarak multizona dapat dilakukan hingga 8×8 zona dengan lebar bidang diagonal 63° view (FoV) yang bisa
dikurangi dengan perangkat lunak. Setiap zona VL53L5CX mengukur jarak target hingga 4 meter, pada frekuensi maksimum 60 Hz.
Berkat algoritma histogram yang dipatenkan STMicroelectronics, VL53L5CX mampu mendeteksi objek berbeda di dalam FoV.
Histogram juga memberikan kekebalan untuk menutupi crosstalk kaca melebihi 60 cm.

Referensi
Lembar data VL53L5CX (DS13754).
Akronim dan singkatan
| Akronim/singkatan | Definisi |
| KELINCI BETINA | elemen optik difraksi |
| Sudut Pandang | bidang view |
| aku²C | sirkuit antar-terintegrasi (bus serial) |
| Kcps/SPAD | Hitungan kilo per detik per sekop (satuan yang digunakan untuk mengukur jumlah foton ke dalam larik SPAD) |
| RAM | memori akses acak |
| SCL | garis jam seri |
| Gereja Masehi Advent Hari Ketujuh | data serial |
| SPAD | dioda longsoran foton tunggal |
| ToF | Waktu penerbangan |
| Bahasa Inggris | driver ultra ringan |
| VCSEL | dioda pemancar permukaan rongga vertikal |
| VHV | volume yang sangat tinggitage |
| Xbicara | pembicaraan silang |
Deskripsi fungsional
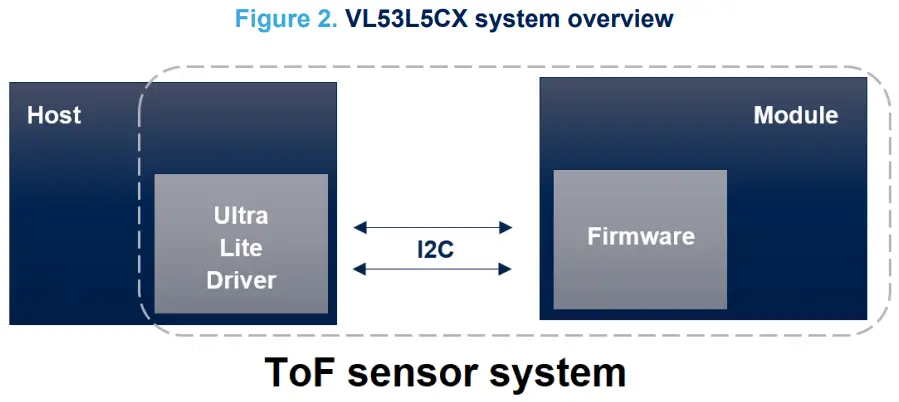
Sistem selesaiview
Sistem VL53L5CX terdiri dari modul perangkat keras dan perangkat lunak driver ultra lite (VL53L5CX ULD) yang berjalan pada host (lihat gambar di bawah). Modul perangkat keras berisi sensor ToF. STMicroelectronics memberikan driver perangkat lunak, yang dalam dokumen ini disebut sebagai “driver”. Dokumen ini menjelaskan fungsi driver yang dapat diakses oleh host. Fungsi-fungsi ini mengontrol sensor dan mendapatkan data jangkauan.
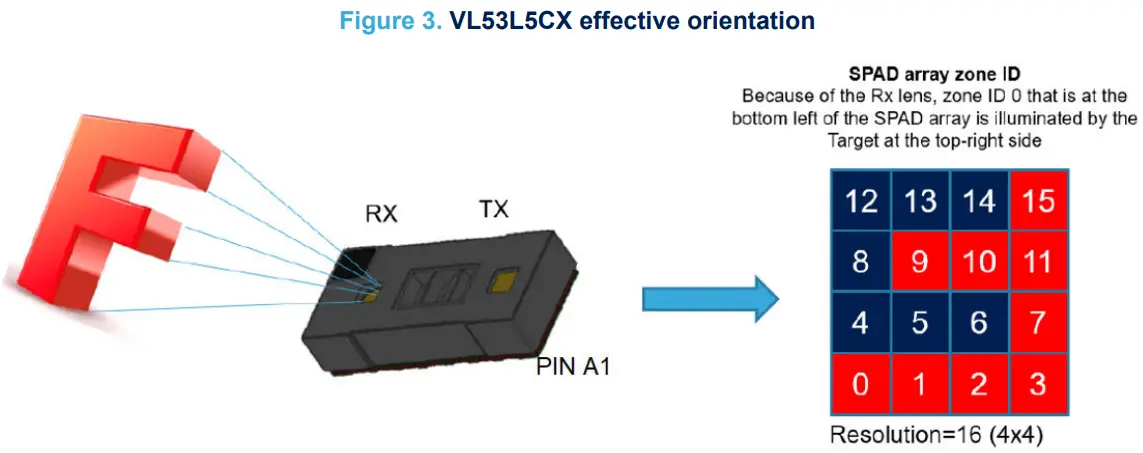
Orientasi yang efektif
Modul ini menyertakan lensa di atas apertur Rx, yang membalik (secara horizontal dan vertikal) gambar target yang diambil. Akibatnya, zona yang diidentifikasi sebagai zona 0, di kiri bawah larik SPAD, diterangi oleh target yang terletak di sisi kanan atas TKP.
Skema dan konfigurasi I²C
Komunikasi antara driver dan firmware ditangani oleh I²C, dengan kemampuan beroperasi hingga 1 MHz. Implementasinya memerlukan pull-up pada jalur SCL dan SDA. Lihat lembar data VL53L5CX untuk informasi lebih lanjut.
Perangkat VL53L5CX memiliki alamat I²C default 0x52. Namun, dimungkinkan untuk mengubah alamat default untuk menghindari konflik dengan perangkat lain, atau memfasilitasi penambahan beberapa modul VL53L5CX ke sistem untuk FoV sistem yang lebih besar. Alamat I²C dapat diubah menggunakan fungsi vl53l5cx_set_i2c_address().
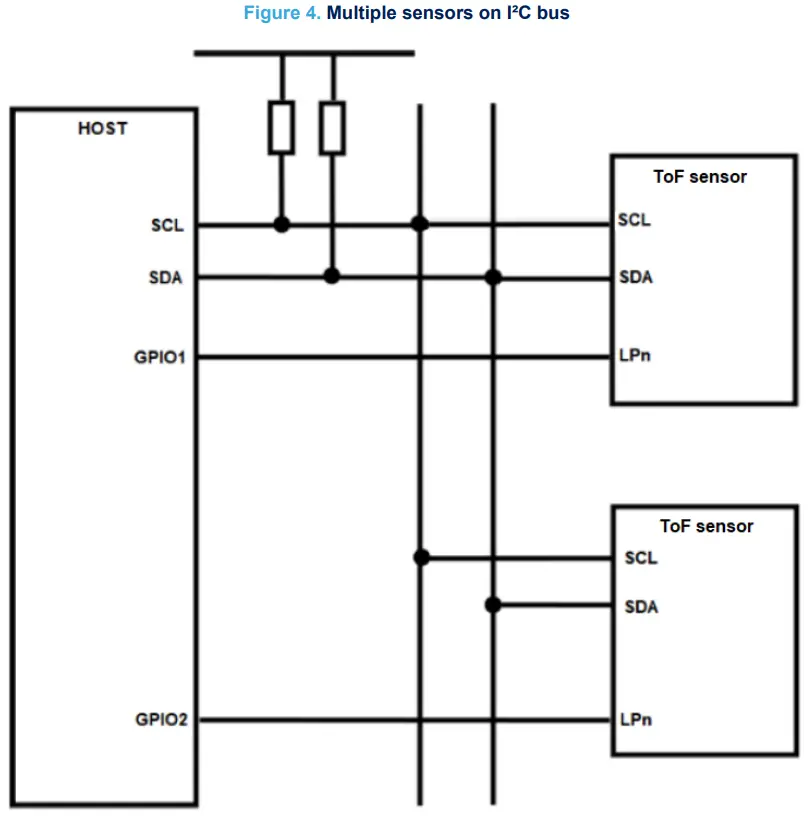
Untuk memungkinkan suatu perangkat mengubah alamat I²C-nya tanpa memengaruhi perangkat lain di bus I²C, penting untuk menonaktifkan komunikasi I²C pada perangkat yang tidak diubah. Prosedurnya adalah sebagai berikut:
- Nyalakan sistem seperti biasa.
- Tarik ke bawah pin LPn perangkat yang alamatnya tidak akan diubah.
- Tarik pin LPn perangkat yang alamat I²Cnya diubah.
- Program alamat I²C ke perangkat menggunakan fungsi set_i2c_address().
- Tarik pin LPn perangkat yang tidak diprogram ulang.
Semua perangkat sekarang harus tersedia di bus I²C. Ulangi langkah di atas untuk semua perangkat VL53L5CX di sistem yang memerlukan alamat I²C baru.
Konten paket dan aliran data
Arsitektur dan konten driver
Paket ULD VL53L5CX terdiri dari empat folder. Drivernya ada di folder /VL53L5CX_ULD_API.
Pengemudi terdiri dari wajib dan opsional files. Opsional files adalah plugins digunakan untuk memperluas fitur ULD.
Setiap plugin dimulai dengan kata “vl53l5cx_plugin” (misalnya vl53l5cx_plugin_xtalk.h). Jika pengguna tidak menginginkan yang diusulkan plugins, mereka dapat dihapus tanpa memengaruhi fitur driver lainnya. Gambar berikut mewakili wajib files dan opsional plugins.
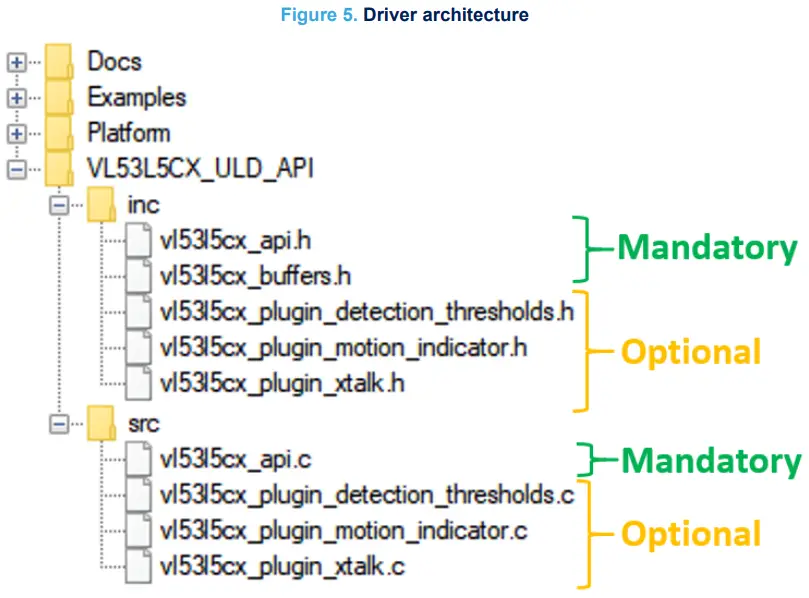
Pengguna juga perlu menerapkan dua fileterletak di folder / Platform. Platform yang diusulkan adalah shell kosong, dan harus diisi dengan fungsi khusus.
Catatan: Peron.h file berisi makro wajib untuk menggunakan ULD. Semua file konten wajib untuk menggunakan ULD dengan benar.
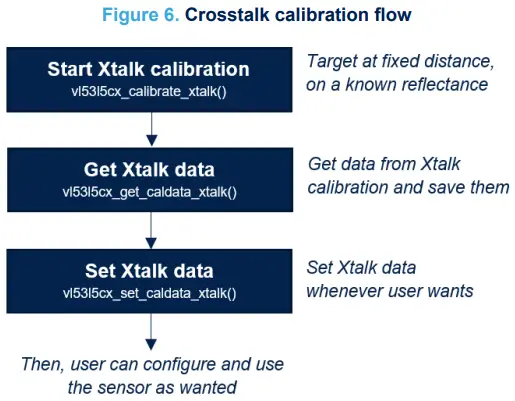
Aliran kalibrasi
Crosstalk (Xtalk) didefinisikan sebagai jumlah sinyal yang diterima pada array SPAD, yang disebabkan oleh pantulan cahaya VCSEL di dalam jendela pelindung (kaca penutup) yang ditambahkan di atas modul. Modul VL53L5CX dikalibrasi sendiri, dan dapat digunakan tanpa kalibrasi tambahan apa pun.
Kalibrasi crosstalk mungkin diperlukan jika modul dilindungi oleh kaca penutup. VL53L5CX kebal terhadap crosstalk melebihi 60 cm berkat algoritma histogram. Namun, pada jarak pendek di bawah 60 cm, Xtalk bisa lebih besar dari sinyal yang dikembalikan sebenarnya. Hal ini memberikan pembacaan target yang salah atau membuat target tampak lebih dekat dari yang sebenarnya. Semua fungsi kalibrasi crosstalk disertakan dalam plugin Xtalk (opsional). Pengguna perlu menggunakan file 'vl53l5cx_plugin_xtalk'.
Crosstalk dapat dikalibrasi satu kali, dan data dapat disimpan sehingga dapat digunakan kembali nanti. Diperlukan target pada jarak tetap, dengan reflektansi yang diketahui. Jarak minimum yang diperlukan adalah 600 mm, dan target harus mencakup seluruh FoV. Tergantung pada pengaturannya, pengguna dapat mengubah pengaturan untuk menyesuaikan kalibrasi crosstalk, seperti yang diusulkan dalam tabel berikut.
Meja 1. Pengaturan yang tersedia untuk kalibrasi
| Pengaturan | menit | Diusulkan oleh STMicroelectronics | Maksimal |
| Jarak [mm] | 600 | 600 | 3000 |
| Jumlah sampsedikit | 1 | 4 | 16 |
| Refleksi [%] | 1 | 3 | 99 |
Catatan: Meningkatkan jumlah sampfile meningkatkan akurasi, tetapi juga meningkatkan waktu untuk kalibrasi. Waktu relatif terhadap jumlah sampfile adalah linier, dan nilai mengikuti perkiraan waktu tunggu:
- 1 detikample ≈ 1 detik
- 4 detikample ≈ 2.5 detik
- 16 detikample ≈ 8.5 detik
Kalibrasi dilakukan menggunakan fungsi vl53l5cx_calibrate_xtalk(). Fungsi ini dapat digunakan kapan saja. Namun sensornya harus diinisialisasi terlebih dahulu. Gambar berikut mewakili aliran kalibrasi crosstalk.
Mulai aliran
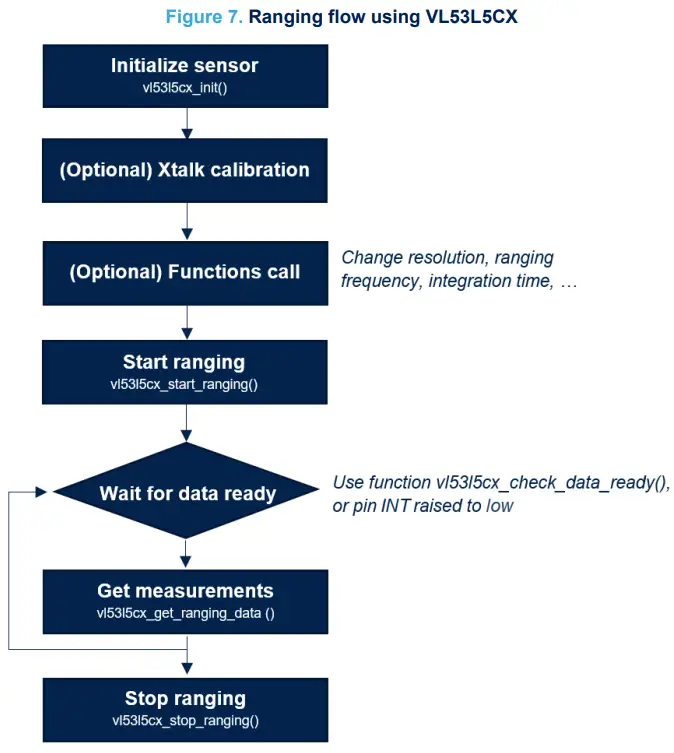
Gambar berikut mewakili aliran mulai digunakan untuk mendapatkan pengukuran. Kalibrasi Xtalk dan panggilan fungsi opsional harus digunakan sebelum memulai sesi mulai. Fungsi get/set tidak dapat digunakan selama sesi starting, dan pemrograman 'on-the-fly' tidak didukung.
Fitur yang tersedia
API ULD VL53L5CX mencakup beberapa fungsi, yang memungkinkan pengguna menyetel sensor, bergantung pada kasus penggunaan. Semua fungsi yang tersedia untuk pengemudi dijelaskan di bagian berikut.
Inisialisasi
Inisialisasi harus dilakukan sebelum menggunakan sensor VL53L5CX. Operasi ini mengharuskan pengguna untuk:
- Nyalakan sensor (pin VDDIO, AVDD, LPn disetel ke Tinggi, dan pin I2C_RST disetel ke 0)
- Panggil fungsi vl53l5cx_init(). Fungsi ini menyalin firmware (~84 Kbytes) ke modul. Hal ini dilakukan dengan memuat kode melalui antarmuka I²C, dan melakukan boot rutin untuk menyelesaikan inisialisasi.
Manajemen pengaturan ulang sensor
Untuk mengatur ulang perangkat, pin berikut perlu diubah:
- Atur pin VDDIO, AVDD, dan LPn ke rendah.
- Tunggu 10 mdtk.
- Atur pin VDDIO, AVDD, dan pin LPn ke tinggi.
Catatan: Mengalihkan hanya pin I2C_RST akan mengatur ulang komunikasi I²C.
Resolusi
Resolusi sesuai dengan jumlah zona yang tersedia. Sensor VL53L5CX memiliki dua kemungkinan resolusi: 4×4 (16 zona) dan 8×8 (64 zona). Secara default sensor diprogram dalam 4×4.
Fungsi vl53l5cx_set_resolusi() memungkinkan pengguna untuk mengubah resolusi. Karena frekuensi rentang bergantung pada resolusi, fungsi ini harus digunakan sebelum memperbarui frekuensi rentang. Selain itu, mengubah resolusi juga meningkatkan ukuran lalu lintas pada bus I²C saat hasilnya dibaca.
Mulai frekuensi
Rentang frekuensi dapat digunakan untuk mengubah frekuensi pengukuran. Karena frekuensi maksimum berbeda antara resolusi 4×4 dan 8×8, fungsi ini perlu digunakan setelah memilih resolusi. Nilai minimum dan maksimum yang diperbolehkan tercantum dalam tabel berikut.
Meja 2. Rentang frekuensi minimum dan maksimum
| Resolusi | Frekuensi rentang minimum [Hz] | Frekuensi rentang maks [Hz] |
| Ukuran 4×4 | 1 | 60 |
| Ukuran 8×8 | 1 | 15 |
Rentang frekuensi dapat diperbarui menggunakan fungsi vl53l5cx_set_ranging_frequency_hz(). Secara default, frekuensi rentang diatur ke 1 Hz.
Mode jangkauan
Mode mulai memungkinkan pengguna untuk memilih antara rentang dalam performa tinggi atau konsumsi daya rendah. Ada dua mode yang diusulkan:
- Berkelanjutan: Perangkat terus mengambil bingkai dengan rentang frekuensi yang ditentukan oleh pengguna. VCSEL diaktifkan selama semua jangkauan, jadi jarak jangkauan maksimum dan kekebalan sekitar lebih baik. Mode ini disarankan untuk pengukuran rentang cepat atau performa tinggi.
- Otonom: Ini adalah mode default. Perangkat terus mengambil bingkai dengan rentang frekuensi yang ditentukan oleh pengguna. VCSEL diaktifkan selama periode yang ditentukan oleh pengguna, menggunakan fungsi vl53l5cx_set_integration_time_ms(). Karena VCSEL tidak selalu diaktifkan, konsumsi daya berkurang. Manfaatnya lebih jelas dengan frekuensi jangkauan yang berkurang. Mode ini disarankan untuk aplikasi berdaya rendah.
Mode mulai dapat diubah menggunakan fungsi vl53l5cx_set_ranging_mode().
Waktu integrasi
Waktu integrasi adalah fitur yang hanya tersedia menggunakan mode rentang otonom (lihat Bagian 4.5: Mode rentang otonom). Hal ini memungkinkan pengguna untuk mengubah waktu saat VCSEL diaktifkan. Mengubah waktu integrasi jika mode rentang diatur ke kontinu tidak berpengaruh. Waktu integrasi default diatur ke 5 ms.
Pengaruh waktu integrasi berbeda untuk resolusi 4x4 dan 8x8. Resolusi 4×4 terdiri dari satu kali integrasi, dan resolusi 8×8 terdiri dari empat kali integrasi. Angka berikut mewakili emisi VCSEL untuk kedua resolusi.
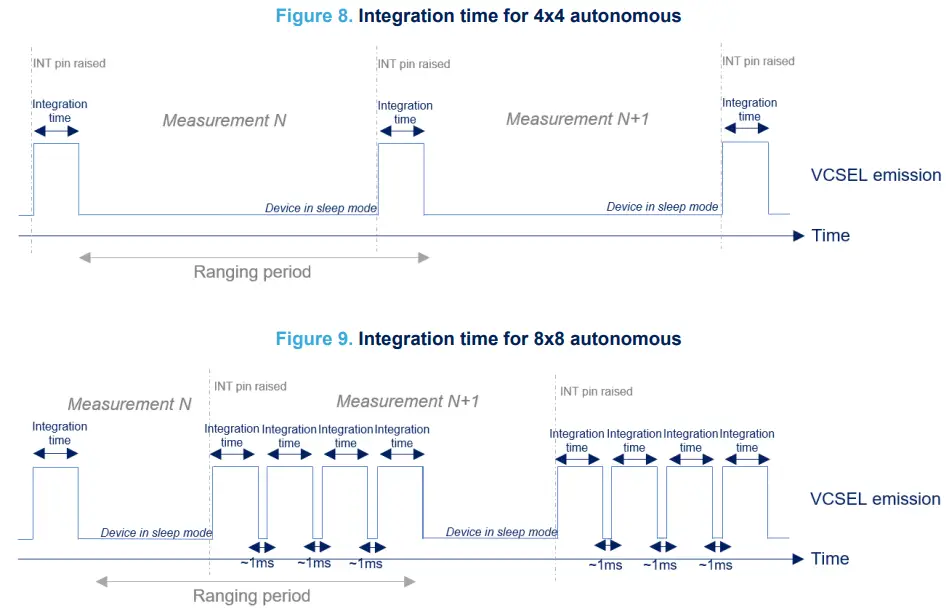
Jumlah seluruh waktu integrasi + overhead 1 ms harus lebih rendah dari periode pengukuran. Jika tidak, periode jangkauan secara otomatis bertambah.
Mode daya
Mode daya dapat digunakan untuk mengurangi konsumsi daya saat perangkat tidak digunakan. VL53L5CX dapat beroperasi dalam salah satu mode daya berikut:
- Wake-up: Perangkat disetel dalam HP idle (daya tinggi), menunggu instruksi.
- Tidur: Perangkat diatur dalam LP idle (daya rendah), kondisi daya rendah. Perangkat tidak dapat digunakan sampai disetel ke mode bangun.
Mode ini mempertahankan firmware dan konfigurasi.
Mode daya dapat diubah menggunakan fungsi vl53l5cx_set_power_mode(). Mode defaultnya adalah bangun.
Catatan: Jika pengguna ingin mengubah mode daya, perangkat tidak boleh dalam keadaan mulai.
Rautan
Sinyal yang dikembalikan dari suatu target bukanlah pulsa bersih dengan tepi yang tajam. Tepiannya miring dan dapat mempengaruhi jarak yang dilaporkan di zona yang berdekatan. Rautan digunakan untuk menghilangkan sebagian atau seluruh sinyal yang disebabkan oleh silau yang menyilaukan.
Sang mantanample yang ditunjukkan pada gambar berikut mewakili target dekat pada 100 mm yang berpusat di FoV, dan target lain, lebih jauh di belakang pada 500 mm. Bergantung pada nilai rautan, target dekat mungkin muncul di lebih banyak zona daripada yang asli.
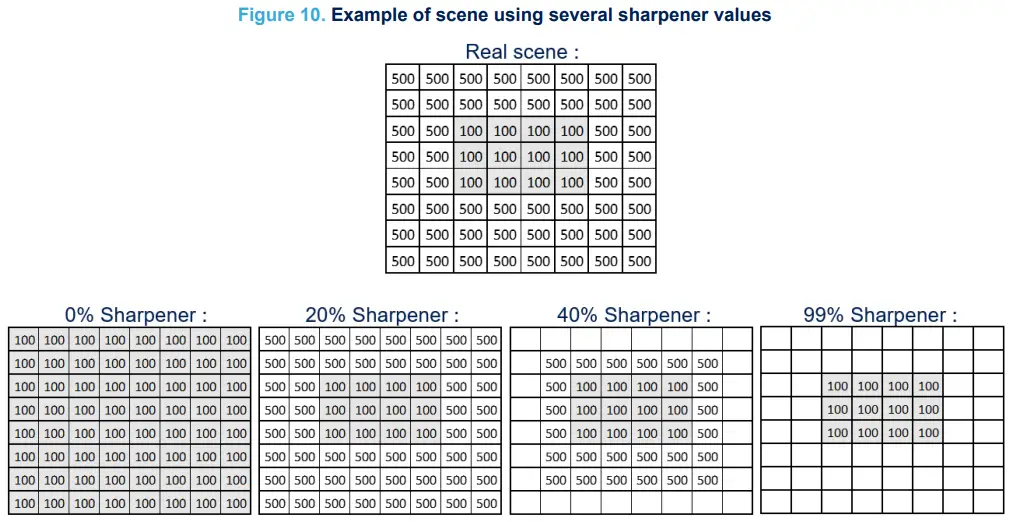
Rautan dapat diubah menggunakan fungsi vl53l5cx_set_sharpener_percent(). Nilai yang diperbolehkan adalah antara 0% dan 99%. Nilai defaultnya adalah 5%.
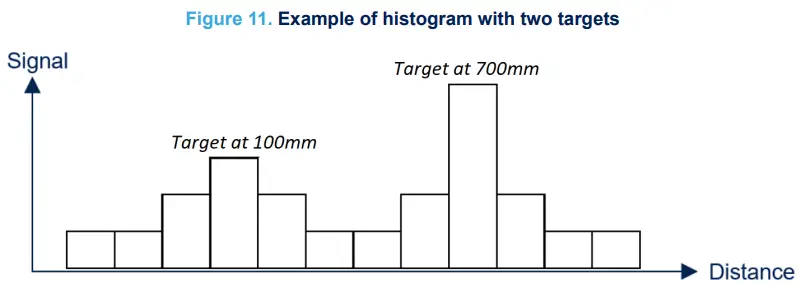
Urutan sasaran
VL53L5CX dapat mengukur beberapa target per zona. Berkat pemrosesan histogram, tuan rumah dapat memilih urutan target yang dilaporkan. Ada dua opsi:
- Terdekat: Target terdekat adalah yang pertama kali dilaporkan
- Terkuat: Target terkuat adalah yang pertama kali dilaporkan
Urutan target dapat diubah menggunakan fungsi vl53l5cx_set_target_order(). Urutan defaultnya adalah Terkuat.
Sang mantanampfile pada gambar berikut mewakili deteksi dua target. Satu pada 100 mm dengan pantulan rendah, dan satu lagi pada 700 mm dengan pantulan tinggi.
Beberapa target per zona
VL53L5CX dapat mengukur hingga empat target per zona. Pengguna dapat mengonfigurasi jumlah target yang dikembalikan oleh sensor.
Catatan: Jarak minimal antara dua target yang akan dideteksi adalah 600 mm.
Pemilihan tidak dapat dilakukan dari pengemudi; itu harus dilakukan di 'Platform.h' file. Makro VL53L5CX_NB_ TARGET_PER_ZONE perlu disetel ke nilai antara 1 dan 4. Urutan target yang dijelaskan di Bagian 4.9: Urutan target berdampak langsung pada urutan target yang terdeteksi. Secara default, sensor hanya mengeluarkan maksimal satu target per zona.
Catatan: Peningkatan jumlah target per zona meningkatkan ukuran RAM yang dibutuhkan
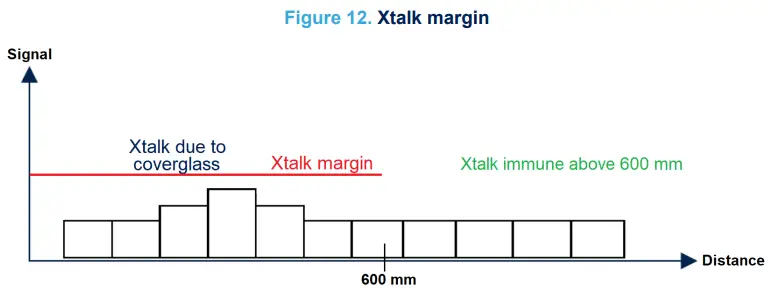
Margin bicara
Margin Xtalk adalah fitur tambahan yang hanya tersedia menggunakan plugin Xtalk. .c dan .f files 'vl53l5cx_plugin_xtalk' perlu digunakan.
Margin digunakan untuk mengubah ambang deteksi ketika ada kaca penutup di bagian atas sensor. Ambang batas dapat ditingkatkan untuk memastikan bahwa kaca penutup tidak pernah terdeteksi, setelah mengatur data kalibrasi crosstalk. Misalnyaample, pengguna dapat menjalankan kalibrasi crosstalk pada satu perangkat, dan menggunakan kembali data kalibrasi yang sama untuk semua perangkat lainnya. Margin Xtalk dapat digunakan untuk menyetel koreksi crosstalk. Gambar di bawah mewakili margin Xtalk.
Ambang deteksi
Selain kemampuan jangkauan reguler, sensor dapat diprogram untuk mendeteksi objek dengan kriteria tertentu yang telah ditentukan sebelumnya. Fitur ini tersedia menggunakan plugin "ambang deteksi", yang merupakan opsi yang tidak disertakan secara default di API. Itu files disebut 'vl53l5cx_plugin_detection_thresholds' perlu digunakan.
Fitur ini dapat digunakan untuk memicu interupsi ke pin A3 (INT) saat kondisi yang ditentukan oleh pengguna terpenuhi. Ada tiga kemungkinan konfigurasi:
- Resolusi 4×4: menggunakan satu ambang batas per zona (total 16 ambang batas)
- Resolusi 4×4: menggunakan dua ambang batas per zona (total 32 ambang batas)
- Resolusi 8×8: menggunakan satu ambang batas per zona (total 64 ambang batas)
Apapun konfigurasi yang digunakan, prosedur untuk membuat threshold dan ukuran RAM adalah sama. Untuk setiap kombinasi ambang, beberapa kolom harus diisi: - ID zona: id zona yang dipilih (lihat Bagian 2.2: Orientasi efektif)
- Pengukuran: pengukuran untuk menangkap (jarak, sinyal, jumlah SPAD, …)
- Ketik: jendela pengukuran (di jendela, di luar jendela, di bawah ambang rendah, …)
- Ambang rendah: pengguna ambang rendah untuk pemicu. Pengguna tidak perlu mengatur format, secara otomatis ditangani oleh API.
- Ambang batas tinggi: ambang batas tinggi bagi pengguna untuk pemicu. Pengguna tidak perlu mengatur format; itu secara otomatis ditangani oleh API.
- Operasi matematis: hanya digunakan untuk 4×4 – 2 kombinasi ambang batas per zona. Pengguna dapat mengatur kombinasi menggunakan beberapa ambang batas dalam satu zona.
Indikator gerak
Sensor VL53L5CX memiliki fitur firmware tertanam yang memungkinkan deteksi gerakan dalam sebuah adegan. Indikator gerak dihitung antara frame berurutan. Opsi ini tersedia menggunakan plugin'vl53l5cx_plugin_motion_indicator'.
Indikator gerakan diinisialisasi menggunakan fungsi vl53l5cx_motion_indicator_init(). Untuk mengubah resolusi sensor, perbarui resolusi indikator gerakan menggunakan fungsi khusus: vl53l5cx_motion_indicator_set_solving().
Pengguna juga dapat mengubah jarak minimum dan maksimum untuk mendeteksi gerakan. Perbedaan antara jarak minimum dan maksimum tidak boleh lebih dari 1500 mm. Secara default, jarak diinisialisasi dengan nilai antara 400 mm dan 1500 mm.
Hasil disimpan di bidang 'motion_indicator'. Di bidang ini, larik 'gerakan' memberikan nilai yang berisi intensitas gerakan per zona. Nilai yang tinggi menunjukkan variasi gerakan yang tinggi di antara bingkai. Pergerakan tipikal memberikan nilai antara 100 dan 500. Sensitivitas ini bergantung pada waktu integrasi, jarak target, dan reflektansi target.
Kombinasi ideal untuk aplikasi berdaya rendah adalah penggunaan indikator gerakan dengan mode rentang otonom, dan ambang deteksi yang diprogram pada gerakan. Ini memungkinkan deteksi variasi gerakan dalam FoV dengan konsumsi daya minimum.
Kompensasi suhu berkala
Performa jangkauan dipengaruhi oleh variasi suhu. Sensor VL53L5CX menyematkan kompensasi suhu yang dikalibrasi satu kali saat streaming dimulai. Namun, jika suhu berubah, kompensasinya mungkin tidak sesuai dengan suhu baru. Untuk menghindari masalah ini, pelanggan dapat menjalankan kompensasi suhu berkala dengan menggunakan VHV otomatis. Kalibrasi suhu berkala memerlukan waktu beberapa milidetik untuk dijalankan. Pengguna dapat menentukan periodenya.
Untuk menggunakan fitur ini, pelanggan perlu:
• Panggil fungsi vl53l5cx_set_VHV_repeat_count().
• Kemudian, berikan jumlah frame di antara setiap kalibrasi baru sebagai argumennya.
Jika argumennya 0, kompensasi dinonaktifkan.
Mulai hasil
Data yang tersedia
Daftar ekstensif data target dan lingkungan mungkin dihasilkan selama aktivitas rentang. Tabel berikut menjelaskan parameter yang tersedia untuk pengguna.
Meja 3. Output yang tersedia menggunakan sensor VL53L5CX
| Elemen | Nb byte (RAM) | Satuan | Keterangan |
| Ambien per SPAD | 256 | Kcps/SPAD | Pengukuran laju ambien dilakukan pada larik SPAD, tanpa emisi foton aktif, untuk mengukur laju sinyal ambien akibat derau. |
| Jumlah target terdeteksi | 64 | Tidak ada | Jumlah target yang terdeteksi di zona saat ini. Nilai ini harus menjadi yang pertama diperiksa untuk mengetahui validitas pengukuran. |
| Jumlah SPAD diaktifkan | 256 | Tidak ada | Jumlah SPAD yang diaktifkan untuk pengukuran saat ini. Target reflektif jauh atau rendah mengaktifkan lebih banyak SPAD. |
| Sinyal per SPAD | 256 x target nb diprogram | Kcps/SPAD | Kuantitas foton diukur selama pulsa VCSEL. |
| Rentang sigma | 128 x target nb diprogram | Milimeter | Estimator Sigma untuk kebisingan dalam jarak target yang dilaporkan. |
| Jarak | 128 x target nb diprogram | Milimeter | Jarak sasaran |
| Status sasaran | 64 x target nb diprogram | Tidak ada | Validitas pengukuran. Melihat Bagian 5.5: Hasil interpretasi untuk informasi lebih lanjut. |
| Reflektansi | 64 x target angka diprogram | Persen | Estimasi pemantulan target dalam persen |
| Indikator gerak | 140 | Tidak ada | Struktur yang memuat hasil indikator gerak. Bidang 'gerak' berisi intensitas gerak. |
Catatan: Untuk beberapa elemen (sinyal per spad, sigma,…) akses ke data berbeda jika pengguna telah memprogram lebih dari satu target per zona (lihat Bagian 4.10: Beberapa target per zona). Lihat contohample kode untuk informasi lebih lanjut.
Sesuaikan pilihan output
Secara default, semua output VL53L5CX diaktifkan. Jika diperlukan, pengguna dapat menonaktifkan beberapa keluaran sensor.
Menonaktifkan pengukuran tidak tersedia pada pengemudi; itu harus dilakukan di 'Platform.h' file. Pengguna dapat mendeklarasikan makro berikut untuk menonaktifkan output:
#menentukan VL53L5CX_DISABLE_AMBIENT_PER_SPAD
#tentukan VL53L5CX_DISABLE_NB_SPADS_ENABLED
#tentukan VL53L5CX_DISABLE_NB_TARGET_DETECTED
#menentukan VL53L5CX_DISABLE_SIGNAL_PER_SPAD
#menentukan VL53L5CX_DISABLE_RANGE_SIGMA_MM
#tentukan VL53L5CX_DISABLE_DISTANCE_MM
#menentukan VL53L5CX_DISABLE_TARGET_STATUS
#menentukan VL53L5CX_DISABLE_REFLECTANCE_PERCENT
#menentukan VL53L5CX_DISABLE_MOTION_INDICATOR
Akibatnya, bidang tersebut tidak dideklarasikan dalam struktur hasil, dan data tidak ditransfer ke host. Ukuran RAM dan ukuran I²C dikurangi.
Untuk memastikan konsistensi data, ST selalu menyarankan untuk tetap mengaktifkan 'jumlah target terdeteksi' dan 'status target'. Ini menyaring pengukuran tergantung pada status target (lihat Bagian 5.5: Interpretasi hasil).
Mendapatkan hasil yang beragam
Selama sesi rentang, ada dua cara untuk mengetahui apakah data rentang baru tersedia:
- Mode polling: Terus menggunakan fungsi vl53l5cx_check_data_ready(). Ini mendeteksi jumlah aliran baru yang dikembalikan oleh sensor.
- Mode interupsi: Menunggu interupsi yang muncul pada pin A3 (GPIO1). Interupsi secara otomatis dihapus setelah ~100 μs.
Saat data baru sudah siap, hasilnya bisa dibaca menggunakan fungsi vl53l5cx_get_ranging_data(). Ini mengembalikan struktur yang diperbarui yang berisi semua keluaran yang dipilih. Karena perangkat tidak sinkron, tidak ada interupsi yang harus dihapus untuk melanjutkan sesi mulai.
Fitur ini tersedia untuk mode rentang kontinu dan otonom.
Menggunakan format firmware mentah
Setelah mentransfer data rentang melalui I²C, terjadi konversi antara format firmware dan format host. Operasi ini biasanya dilakukan untuk mendapatkan jarak jangkauan dalam milimeter sebagai keluaran default sensor. Jika pengguna ingin menggunakan format firmware, makro berikut harus ditentukan di platform file: VL53L5CX
#menentukan VL53L5CX_USE_RAW_FORMAT
Interpretasi hasil
Data yang dikembalikan oleh VL53L5CX dapat disaring untuk memperhitungkan status target. Status menunjukkan validitas pengukuran. Daftar status lengkap dijelaskan dalam tabel berikut.
Meja 4. Daftar status target yang tersedia
| Status sasaran | Keterangan |
| 0 | Mulai data tidak diperbarui |
| 1 | Laju sinyal terlalu rendah pada larik SPAD |
| 2 | Fase sasaran |
| 3 | Estimator Sigma terlalu tinggi |
| 4 | Konsistensi target gagal |
| 5 | Rentang valid |
| 6 | Bungkus tidak dilakukan (biasanya rentang pertama) |
| 7 | Konsistensi tarif gagal |
| 8 | Tingkat sinyal terlalu rendah untuk target saat ini |
| 9 | Jangkauan valid dengan pulsa besar (mungkin karena target yang digabungkan) |
| 10 | Rentang valid, tetapi tidak ada target yang terdeteksi pada rentang sebelumnya |
| 11 | Konsistensi pengukuran gagal |
| 12 | Target kabur oleh yang lain, karena rautan |
| 13 | Target terdeteksi tetapi data tidak konsisten. Sering terjadi pada target sekunder. |
| 255 | Tidak ada target yang terdeteksi (hanya jika jumlah target yang terdeteksi diaktifkan) |
Untuk mendapatkan data yang konsisten, pengguna perlu memfilter status target yang tidak valid. Untuk memberikan peringkat keyakinan, target dengan status 5 dianggap valid 100%. Status 6 atau 9 dapat dianggap dengan nilai keyakinan 50%. Semua status lainnya berada di bawah tingkat kepercayaan 50%.
Kesalahan pengemudi
Ketika terjadi kesalahan menggunakan sensor VL53L5CX, driver mengembalikan kesalahan tertentu. Tabel berikut mencantumkan kemungkinan kesalahan.
Meja 5. Daftar kesalahan yang tersedia menggunakan driver
| Status sasaran | Keterangan |
| 0 | Tidak ada kesalahan |
|
127 |
Pengguna memprogram pengaturan yang salah
(resolusi tidak diketahui, frekuensi rentang terlalu tinggi,…) |
| 255 | Kesalahan besar. Biasanya kesalahan batas waktu, karena kesalahan I²C. |
| lainnya | Kombinasi beberapa kesalahan yang dijelaskan di atas |
Catatan: Tuan rumah dapat menerapkan lebih banyak kode kesalahan dengan menggunakan platform ini files.
Riwayat revisi
Meja 6. Riwayat revisi dokumen
| Tanggal | Versi | Perubahan |
| 21 Juni 2021 | 1 | Rilis awal |
| 30-Agustus-2021 | 2 | Ditambahkan Bagian 5.4: Menggunakan format firmware mentah
Menambahkan status target baru 13 inci Tabel 4. Daftar status target yang tersedia |
| 05 September 2022 | 3 | Menambahkan catatan tentang jarak minimum minimum antar target Bagian 4.10: Beberapa target per zona |
| 10-Agustus-2023 | 4 | Dimodifikasi Gambar 11. Contohampfile histogram dengan dua target |
| 21 Februari 2024 | 5 | Menambahkan VHV (vol sangat tinggitage) untuk Bagian 1: Akronim dan singkatan. Ditambahkan Bagian 4.14: Kompensasi suhu berkala |
PEMBERITAHUAN PENTING – BACA DENGAN SEKSAMA
STMicroelectronics NV dan anak perusahaannya (“ST”) berhak melakukan perubahan, koreksi, penyempurnaan, modifikasi, dan perbaikan pada produk ST dan/atau dokumen ini kapan saja tanpa pemberitahuan. Pembeli harus memperoleh informasi relevan terkini tentang produk ST sebelum melakukan pemesanan. Produk ST dijual sesuai dengan syarat dan ketentuan penjualan ST yang berlaku pada saat konfirmasi pemesanan.
Pembeli bertanggung jawab penuh atas pilihan, pemilihan, dan penggunaan produk ST dan ST tidak bertanggung jawab atas bantuan aplikasi atau desain produk pembeli.
Tidak ada lisensi, tersurat maupun tersirat, terhadap hak kekayaan intelektual apa pun yang diberikan oleh ST di sini.
Penjualan kembali produk ST dengan ketentuan yang berbeda dari informasi yang ditetapkan di sini akan membatalkan garansi apa pun yang diberikan oleh ST untuk produk tersebut.
ST dan logo ST adalah merek dagang ST. Untuk informasi tambahan tentang merek dagang ST, lihat www.st.com/merek dagangSemua nama produk atau layanan lainnya adalah milik pemiliknya masing-masing.
Informasi dalam dokumen ini menggantikan dan mengganti informasi yang sebelumnya diberikan dalam versi dokumen ini sebelumnya.
© 2024 STMicroelectronics – Semua hak dilindungi undang-undang

Dokumen / Sumber Daya
 |
STMicroelectronics VL53L5CX Multizona Waktu Sensor Jarak Penerbangan [Bahasa Indonesia:] Panduan Pengguna VL53L5CX Sensor Jarak Penerbangan Multizona, VL53L5CX, Sensor Jarak Penerbangan Multizona, Sensor Jarak Penerbangan Waktu, Sensor Jarak Penerbangan, Sensor Jarak, Sensor |



