Blok Fungsi Arah Kecepatan EMD yang Sesuai dengan Danfoss
Spesifikasi
- Nama Produk: PLUS+1 Blok Fungsi Arah Sensor Kecepatan EMD yang Sesuai
- Output: RPM dan sinyal arah
- Rentang Input:
- Kecepatan (Spd): 1,250 hingga 10,000,000
- Arah (Dir In): 0 hingga 5,250 volt
Petunjuk Penggunaan Produk
Konfigurasi Pengontrol
Blok Fungsi EMD_SPD_DIR mengeluarkan sinyal rpm dan arah berdasarkan masukan dari Sensor Kecepatan EMD. Blok ini dapat digunakan pada pengontrol MC dan SC.
Persyaratan Input Pengontrol
Persyaratan masukan pengontrol untuk blok fungsi EMD SPD DIR adalah sebagai berikut:
- Pengendali MC:
- Spd – MFIn – DirIn
- Pengendali SC:
- Spd – MFIn – DirIn – DigAn
Input Blok Fungsi
Input Blok Fungsi EMD_SPD_DIR adalah sebagai berikut:
- Spd (Kecepatan): Bus Per U32 Hitung U16 – Jangkauan:
1,250 hingga 10,000,000 - Dir In (Arah): Tegangan Bus/Volttagdan U16 –
Rentang: 0 hingga 5,250 volt
Output Blok Fungsi
Output Blok Fungsi EMD_SPD_DIR adalah sebagai berikut:
- Status: U16 – Rentang: 0 hingga 65,535
- Kesalahan: U16 – Rentang: 0 hingga 1,000,000,000
- Putaran per menit: U16 – Rentang: 0 hingga 25,000
- dRPM: U16 – Rentang: 0 hingga 2,500
- Sutradara: S8 – Nilai: -1, 0, +1
Tanya Jawab Umum
- Apa tujuan dari Blok Fungsi EMD_SPD_DIR?
Blok Fungsi EMD_SPD_DIR mengeluarkan sinyal rpm dan arah berdasarkan masukan dari Sensor Kecepatan EMD. - Apa saja persyaratan masukan untuk blok fungsi EMD_SPD_DIR pada Pengendali MC?
Persyaratan input untuk Pengendali MC adalah Spd, MFIn, dan DirIn. - Apa itu voltagRentang untuk masukan Arah (Dir In) dari Blok Fungsi EMD_SPD_DIR?
volumetagRentang untuk input Arah adalah dari 0 hingga 5,250 volt.
Riwayat revisi
Tabel revisi
| Tanggal | Berubah | Putaran |
| Desember 2014 | AA |
Blok Fungsi EMD_SPD_DIR
Lebihview
Blok fungsi ini mengeluarkan sinyal rpm dan arah berdasarkan masukan dari Sensor Kecepatan EMD. Pada pengontrol MC dan SC, blok fungsi ini menerima:
- Input Spd melalui input MFIn.
- Masukan DirIn melalui masukan MFIn kedua atau masukan DigAn.
Persyaratan Input Kontroler untuk Blok Fungsi EMD
Tabel berikut mencantumkan persyaratan masukan pengontrol untuk blok fungsi EMD SPD DIR, EMD SPD DIR A, dan EMD SPD DIR D.
Koneksi Input—Pengontrol MC
| Blok Fungsi | Input Blok Fungsi | Input Pengontrol | Komentar |
| EMD SPD DIR | Spd | MFI | Menentukan kecepatan melalui sinyal pulsa dari sensor. |
| DirIn | MFI | Memanfaatkan resistor pull-up/pull-down dan voltage untuk mendeteksi kegagalan sirkuit terbuka pada sinyal arah. | |
| EMD SPD DIR A | Spd | MFI | Menentukan kecepatan melalui sinyal pulsa dari sensor. |
| DirIn | Menggali | Hanya mendeteksi ketika sinyal arah voltage berada di luar rentang yang diharapkan tetapi tidak memiliki resistor pull-up/pull-down untuk deteksi sirkuit terbuka. | |
| SebuahIn | Hanya mendeteksi ketika sinyal arah voltage berada di luar rentang yang diharapkan tetapi tidak memiliki resistor pull-up/pull-down untuk deteksi sirkuit terbuka. | ||
| EMD SPD DIR D | Spd | MFI | Menentukan kecepatan melalui sinyal pulsa dari sensor. |
| DigDir | Menggali | Tidak menyediakan deteksi kesalahan untuk sinyal arah. | |
| Menggali | Tidak menyediakan deteksi kesalahan untuk sinyal arah. |
Koneksi Input—Pengendali SC
| Blok Fungsi | Input Blok Fungsi | Input Pengontrol | Komentar |
| EMD SPD DIR | Spd | MFI | Menentukan kecepatan melalui sinyal pulsa dari sensor. Input pengontrol harus diberi label Gali/Ana/Frekuensi. |
| DirIn | MFI | Memanfaatkan resistor pull-up/pull-down dan voltage untuk mendeteksi kegagalan sirkuit terbuka pada sinyal arah. | |
| Menggali | Memanfaatkan resistor pull-up/pull-down dan voltage untuk mendeteksi kegagalan sirkuit terbuka pada sinyal arah. |
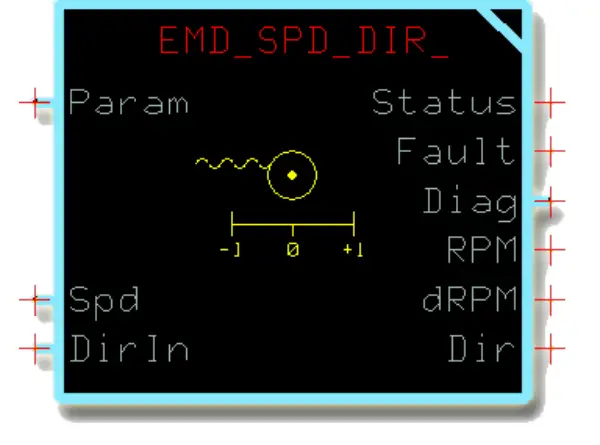
Input Blok Fungsi
| Barang | Jenis | Jangkauan | Keterangan |
| Param | Bis | ——— | Input untuk parameter umum yang dapat diterapkan ke beberapa blok fungsi. Lihat Tentang Input Parameter pada halaman 11 untuk informasi lebih lanjut. |
| Spd | Bis | ——— | Masukan untuk bus dengan:
|
| Per | U32 | 1,250 sampai
10,000,000 |
Periode pengukuran yang dikeluarkan oleh Sensor Kecepatan.
Blok fungsi menggunakan Per sinyal, Menghitung sinyal, dan Denyut nadi/Putaran nilai parameter untuk menghitungnya RPM keluaran. 10,000 = 1,000 μs. |
| Menghitung | U16 | 0 hingga 65,535 | Jumlah yang diukur per loop program yang dikeluarkan oleh Sensor Kecepatan.
Blok fungsi menggunakan Per sinyal, Menghitung sinyal, dan Denyut nadi/Putaran nilai parameter untuk menghitungnya RPM keluaran. 1,000 = 1,000. |
| Konfigurasi | Sub bus | ——— | Berisi sinyal yang mengonfigurasi input ini. |
| Dir Di | Bis | ——— | Masukan untuk bus dengan:
|
| Voltase/Voltasetage | U16 | 0 hingga 5,250 | volume terukurtage dari sinyal arah bahwa Sensor Kecepatan keluaran, yang digunakan blok untuk menentukan arah. |
| Konfigurasi | Sub bus | ——— | Berisi sinyal yang mengonfigurasi input ini. |
Keluaran
Output Blok Fungsi
| Barang | Jenis | Jangkauan | Keterangan |
| Status | U16 | ——— | Melaporkan status blok fungsi.
Blok fungsi ini menggunakan tidak standar skema bitwise untuk melaporkan status dan kesalahannya.
|
| Kesalahan | U16 | ——— | Melaporkan kesalahan blok fungsi.
Blok fungsi ini menggunakan tidak standar skema bitwise untuk melaporkan status dan kesalahannya.
|
| Diag | Bis | ——— | Menghasilkan bus dengan Frekuensi, FltTmrDir, Dan Frekuensi FltTmr sinyal yang tersedia untuk pemecahan masalah. |
| Frekuensi | U32 | 0 hingga 1,000,
000,000 |
Frekuensi terukur dari Sensor Kecepatan. 100,000 = 10,000 Hz. |
| KesalahanTmrFreq | U16 | 0 hingga 65,535 | Ketika terjadi kesalahan frekuensi:
|
| FltTmrDir | U16 | 0 hingga 65,535 | Ketika terjadi kesalahan arah:
|
| RPM | U16 | 0 hingga 2,500 | Revolusi sensor kecepatan per menit.
Blok fungsi clampkeluaran ini pada 2,500 = 1 rpm. |
| dRPM | U16 | 0 hingga 25,000 | Putaran sensor kecepatan per menit x 10 (deciRPM). Blok fungsi clampoutputnya pada 25,000. |
| Dir | S8 | -1, 0, +1 | Arah putaran Sensor Kecepatan.
|
Tentang Koneksi Blok Fungsi
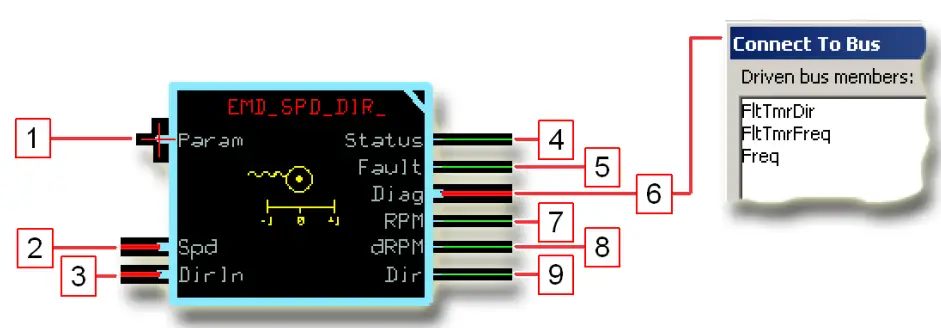
Tentang Koneksi Blok Fungsi
| Barang | Keterangan |
| 1. | Masukan untuk parameter umum yang dapat diterapkan ke beberapa blok fungsi. |
| 2. | Masukan untuk bus dengan:
|
| 3. | Masukan untuk bus dengan:
|
| 4. | Melaporkan status blok fungsi. |
| 5. | Melaporkan kesalahan pada blok fungsi. |
| 6. | Menghasilkan bus dengan Frekuensi, FltTmrDir, Dan Frekuensi FltTmr sinyal yang tersedia untuk pemecahan masalah. |
| 7. | Revolusi sensor kecepatan per menit. |
| 8. | Revolusi sensor kecepatan per menit x 10 (deciRPM). |
| 9. | Arah putaran Sensor Kecepatan.
|
Logika Status dan Kesalahan
Tidak seperti kebanyakan blok fungsi yang sesuai dengan PLUS+1, blok fungsi ini menggunakan kode status dan kesalahan nonstandar.
Logika Status
| Status | Heksagonal* | Biner | Menyebabkan | Tanggapan | Koreksi |
| Parameter berada di luar jangkauan. | ukuran 0x0008 | 1000 | Denyut nadi/Putaran, Deteksi KesalahanTm, atau Kunci DirHz parameter berada di luar jangkauan. | Blok fungsi clampadalah nilai di luar kisaran pada batas atas atau bawahnya. | Kembalikan parameter yang di luar jangkauan ke dalam jangkauannya. |
* Bit 16 diatur ke 1 mengidentifikasi status Danfoss standar atau kode kesalahan.
Logika Kesalahan
| Kesalahan | Heksagonal* | Biner | Menyebabkan | Tanggapan | Menunda† | Memalangi‡ | Koreksi |
| Per sinyal di blok fungsi Spd masukan terlalu rendah. | ukuran 0x0001 | 0001 | Per sinyal < 1,250 Hz. | Blok fungsi mengeluarkan output maksimumnya RPM Dan dRPM nilai-nilai. | Y | N | Periksa masalah perangkat keras, seperti gangguan listrik, yang dapat menghasilkan sinyal tidak valid. Per nilai sinyal. |
| Voltase/Voltasetage sinyal di blok fungsi Spd masukan berada di luar jangkauan. | ukuran 0x0002 | 0010 | Voltase/Voltasetage sinyal antara 1,000 dan 2,500 mV
Dan blok tidak menerima pulsa dari Sensor Kecepatan. |
Blok fungsi mengatur RPM Dan dRPM keluaran ke 0. | Y | N | Periksa masalah perangkat keras, seperti gangguan listrik, yang dapat menghasilkan sinyal tidak valid. Voltase/Voltasetage nilai sinyal. |
| Voltase/Voltasetage sinyal di blok fungsi Dir masukan berada di luar jangkauan. | ukuran 0x0004 | 0100 | Voltase/Voltasetage sinyalnya antara 1,000 dan 2,500
mV. |
Blok fungsi mengatur Dir keluaran ke 0. | Y | N | Periksa masalah perangkat keras, seperti gangguan listrik, yang dapat menghasilkan sinyal tidak valid. Voltase/Voltasetage nilai sinyal. |
* Bit 16 diatur ke 1 mengidentifikasi status Danfoss standar atau kode kesalahan.
† Kesalahan yang tertunda dilaporkan jika kondisi kesalahan yang terdeteksi berlanjut selama waktu tunda yang ditentukan. Kesalahan yang tertunda tidak dapat diatasi hingga kondisi kesalahan tidak terdeteksi selama waktu tunda.
‡ Blok fungsi menyimpan laporan kesalahan yang terkunci hingga kait terlepas.
Parameter Blok Fungsi
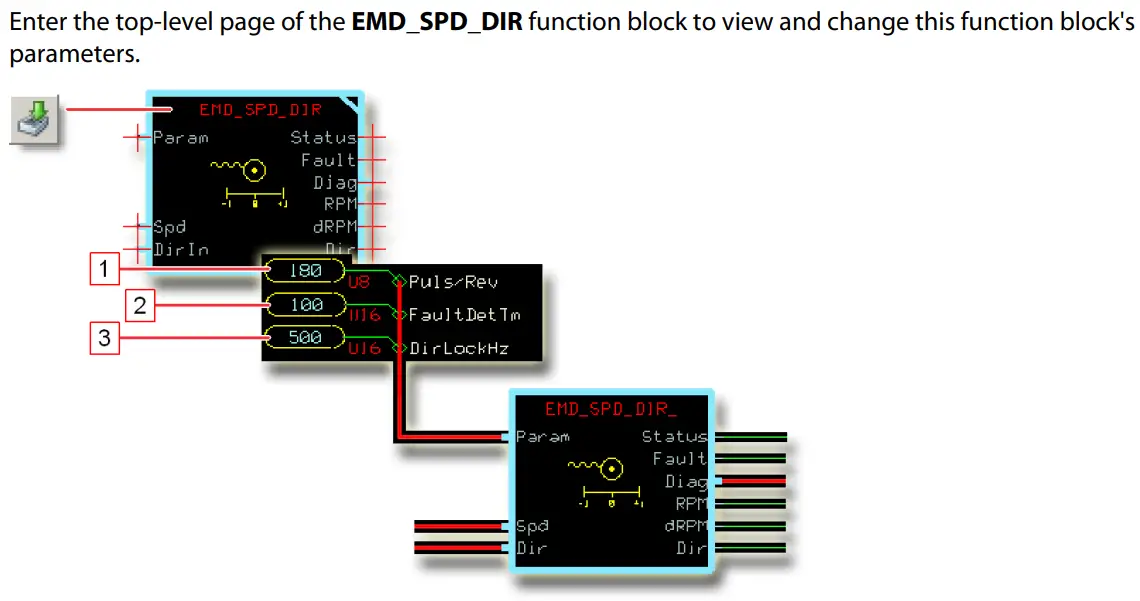
Parameter Blok Fungsi
| Barang | Jenis | Jangkauan | Keterangan |
| 1. Denyut Nadi/Putaran | U8 | 20–120, 180 | Jumlah pulsa per putaran Sensor Kecepatan. Lihat Informasi Teknis Sensor Kecepatan EMD (Danfoss bagian L1017287) untuk nilai yang benar. |
| 2. Deteksi Kesalahan | U16 | 0–65,535 | Mengatur waktu antara saat blok fungsi mendeteksi:
|
| 3. DirLockHz | U16 | 0–8,000 | Mengatur frekuensi di atas blok fungsi Dir kunci keluaran. Di atas frekuensi ini, blok fungsi tidak melaporkan perubahan arah.
1,000 = 1,000 Hz. |
Tentang Input Parameter
Gunakan input Param untuk memasukkan nilai parameter eksternal ke blok fungsi ini.

Detail Gambar
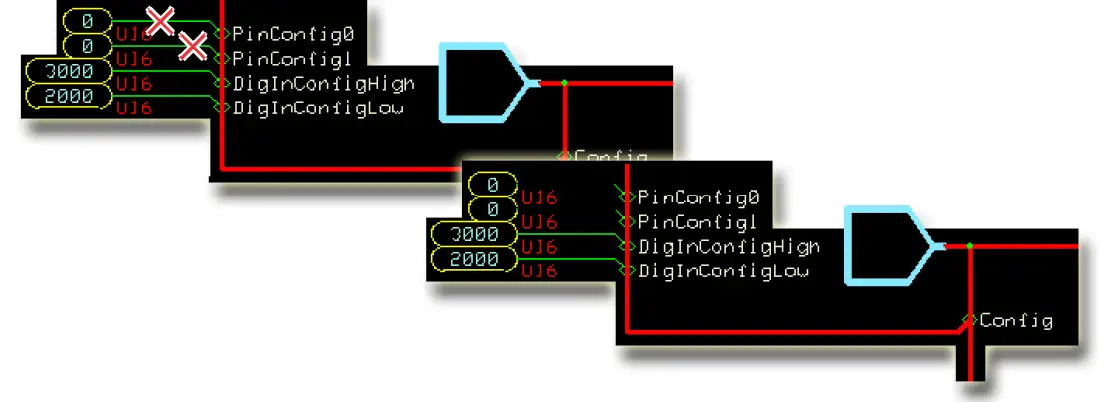
| Barang | Keterangan |
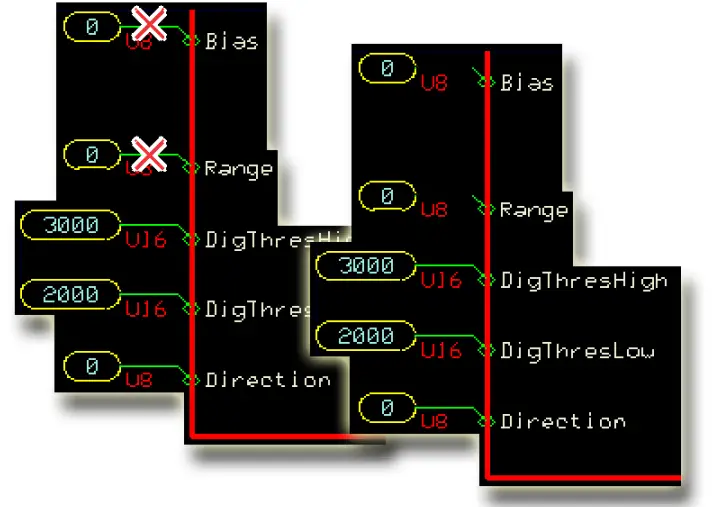
| 1. | Di dalam halaman tingkat atas blok fungsi sebelum Anda mengubah halaman ini untuk menerima parameter umum melalui Param masukan. |
| 2. | Di dalam halaman tingkat atas blok fungsi setelah Anda mengubah halaman ini untuk menerima parameter umum melalui Param masukan. |
Konfigurasi Pengontrol
Input pada pengontrol MC dan SC memerlukan konfigurasi agar dapat bekerja dengan blok fungsi ini. Lihat:
- Konfigurasi Pengendali MC pada halaman 12.
- Konfigurasi Pengendali SC pada halaman 16.
Konfigurasi Pengendali MC
Konfigurasi Input
| Input Blok Fungsi | Jenis Input yang Kompatibel | Tindakan Konfigurasi |
| Spd | MFI | Hapus:
|
| DirIn | MFI | Hapus:
|
| Menggali | Hapus:
|
Konfigurasi Pengontrol
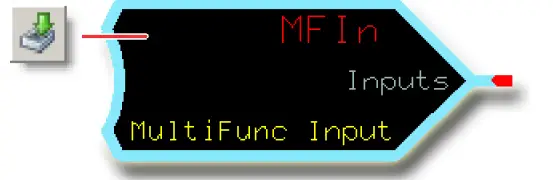
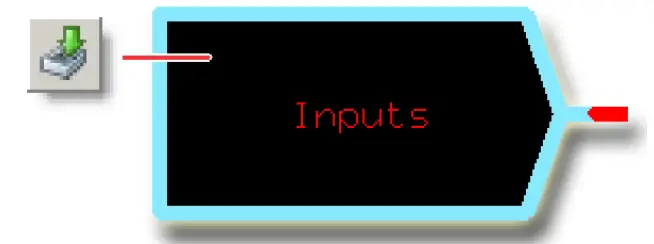
Cara Mengonfigurasi MFIn untuk Input Spd
- Pada templat GUIDE, masuk ke halaman Input.
- Masukkan MFIn yang menerima sinyal input.
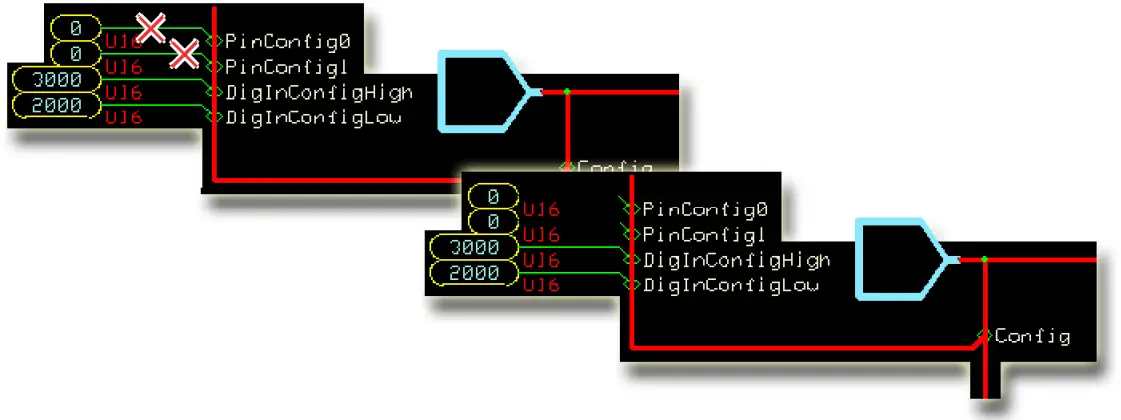
- Lakukan perubahan yang ditunjukkan pada gambar berikut.
Konfigurasi Pengontrol
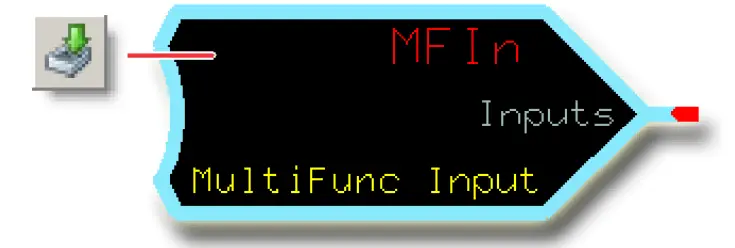
Cara Mengonfigurasi MFIn untuk Input DirIn
- Pada templat GUIDE, masuk ke halaman Input.
- Masukkan MFIn yang menerima sinyal input.
- Lakukan perubahan yang ditunjukkan pada gambar berikut.
Cara Mengonfigurasi DigAn untuk Input DirIn
- Pada templat GUIDE, masuk ke halaman Input.
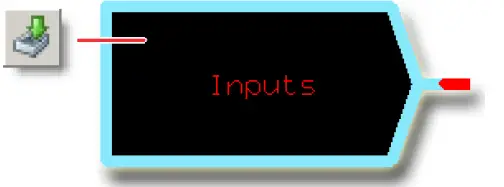
- Masuk ke halaman DigAn yang menerima sinyal masukan.
- Lakukan perubahan yang ditunjukkan pada gambar berikut.

Konfigurasi Pengendali SC
Konfigurasi Input
| Input Blok Fungsi | Jenis Input yang Kompatibel | Tindakan Konfigurasi |
| Spd | MFI* | Hapus:
|
| DirIn | MFI | Hapus:
|
| Menggali | Hapus:
|
* MFIn yang Anda gunakan harus diberi label Dig/Ana/Freq.
† Jika ada.
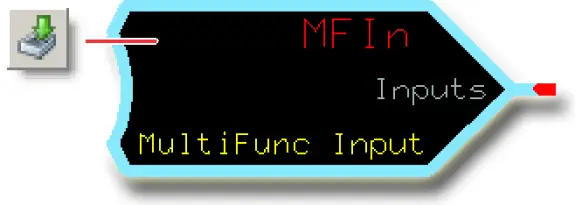
Cara Mengonfigurasi MFIn untuk Input Spd
- Pada templat GUIDE, masuk ke halaman Input.
- Masukkan MFIn yang menerima sinyal input.
- Lakukan perubahan yang ditunjukkan pada gambar berikut.

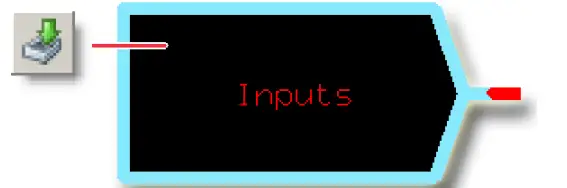
Cara Mengonfigurasi MFIn untuk Input DirIn
- Pada templat GUIDE, masuk ke halaman Input.

- Masukkan MFIn yang menerima sinyal input.
- Lakukan perubahan yang ditunjukkan pada gambar berikut.

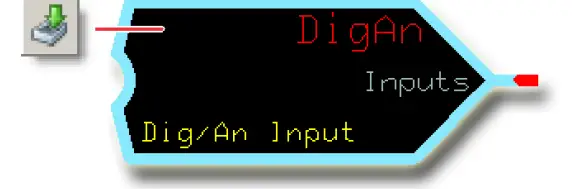
Cara Mengonfigurasi DigAn untuk Input DirIn
- Pada templat GUIDE, masuk ke halaman Input.
- Masukkan DigAn yang menerima sinyal input.

- Lakukan perubahan yang ditunjukkan pada gambar berikut.
Produk yang kami tawarkan
- Motor Poros Bengkok
- Pompa dan Motor Piston Aksial Sirkuit Tertutup
- Menampilkan
- Kemudi Daya Elektrohidraulik
- Elektrohidraulik
- Sistem Penggerak Tenaga Hidrolik
- Sistem Terpadu
- Joystick dan Pegangan Kontrol
- Mikrokontroler dan Perangkat Lunak
- Pompa Piston Aksial Sirkuit Terbuka
- Motor Orbital
- PANDUAN PLUS+1®
- Katup Proporsional
- Sensor
- Mengemudikan
- Penggerak Pengaduk Transit
Danfoss Power Solutions adalah produsen dan pemasok global komponen hidrolik dan elektronik berkualitas tinggi. Kami mengkhususkan diri dalam menyediakan teknologi dan solusi tercanggih yang unggul dalam kondisi pengoperasian yang keras di pasar seluler off-highway. Berdasarkan keahlian aplikasi kami yang luas, kami bekerja sama dengan pelanggan kami untuk memastikan kinerja luar biasa untuk berbagai kendaraan off-highway.
Kami membantu OEM di seluruh dunia mempercepat pengembangan sistem, mengurangi biaya, dan membawa kendaraan ke pasar lebih cepat.
Danfoss – Mitra Terkuat Anda dalam Hidraulik Bergerak.
Pergi ke www.powersolutions.danfoss.com untuk informasi produk lebih lanjut.
Di mana pun kendaraan off-highway bekerja, Danfoss juga bekerja. Kami menawarkan dukungan ahli di seluruh dunia untuk pelanggan kami, memastikan solusi terbaik untuk kinerja luar biasa. Dan dengan jaringan Mitra Layanan Global yang luas, kami juga menyediakan layanan global yang komprehensif untuk seluruh komponen kami.
Silakan menghubungi perwakilan Danfoss Power Solution terdekat di tempat Anda.
Komatrol
www.comatrol.com
Schwarzmüller-Inverter www.schwarzmueller-inverter.com
Turola
www.turollaocg.com
Valmova
www.valmova.com
Hidro-Gear
www.hydro-gear.com
Daikin-Sauer-Danfoss www.daikin-sauer-danfoss.com
Danfoss
Perusahaan Power Solutions (AS) 2800 East 13th Street
Ames, IA 50010, AS
Telepon: +1 515 239 6000
Danfoss
Solusi Daya GmbH & Co. OHG Krokamp 35
D-24539 Neumünster, Jerman Telepon: +49 4321 871 0
Danfoss
Solusi Daya ApS Nordborgvej 81
DK-6430 Nordborg, Denmark Telepon: +45 7488 2222
Danfoss
Solusi Daya (Shanghai) Co., Ltd.
Gedung #22, No. 1000 Jin Hai Rd Jin Qiao, Distrik Baru Pudong Shanghai, Tiongkok 201206 Telepon: +86 21 3418 5200
Danfoss tidak bertanggung jawab atas kemungkinan kesalahan dalam katalog, brosur, dan materi cetakan lainnya. Danfoss berhak mengubah produknya tanpa pemberitahuan. Hal ini juga berlaku untuk produk yang sudah dipesan dengan ketentuan bahwa perubahan tersebut dapat dilakukan tanpa perlu mengubah spesifikasi yang telah disepakati.
Semua merek dagang dalam materi ini adalah milik masing-masing perusahaan. Danfoss dan jenis logo Danfoss adalah merek dagang dari Danfoss A/S. Seluruh hak cipta.
L1429328 • Rev AA • Desember 2014
www.danfoss.com
© Danfoss A/S, 2014
Dokumen / Sumber Daya
 |
Blok Fungsi Arah Kecepatan EMD yang Sesuai dengan Danfoss [Bahasa Indonesia:] Panduan Pengguna Blok Fungsi Arah Kecepatan EMD yang Sesuai, Blok Fungsi Arah Kecepatan, Blok Fungsi Arah, Blok Fungsi, Blok |



